ボルボ 、“自動運転車”を実際に導入する独自のシステムソリューションを発表

ボルボは、一般の自動車ユーザーが乗車する自動運転車を、実際の交通環境下で実現することを可能にする、独自の完成したシステムソリューションを発表した。
ボルボ研究開発担当の上席副社長、ピーター・メルテンス氏は「私たちは、自動運転の分野で今まで実現したことがない未知の領域に向かって進んでいます。通常の交通環境の下、一般のドライバーに自動運転車を利用可能なものとする、という野心を持って実証実験へのステップを踏み出すということは、これまでに誰もなしえていないことです」と語っている。
ボルボが進めるプロジェクト『ドライブ・ミー:持続可能なモビリティのための自動運転』は2年目に入り、一般の顧客が所有する100台の自動運転車を2017年までにイェーテボリ市周辺の一定の公道で走らせるという目標に向けて急速に動き出している。
この実験のユニークな点は、政策立案者や運輸担当の行政機関、市、自動車メーカーが連携して実施すること。持続可能なモビリティおよび衝突事故のない未来の実現を目指すボルボの取り組みの中心的なプロジェクトとなっている。
無駄な時間から、有益な時間へ
ボルボは、起こり得る技術的な障害を細かく分析することで、完成した実現可能な自動運転システムを設計した。この前例がない技術開発が可能となった鍵は、センサーやクラウドベースの測位システム、先進のオートブレーキやステアリングシステムなどからなる複雑なネットワークである。
メルテンス氏は「自動運転は、私たちの運転に対する考え方を根本的に変えるでしょう。将来は、自動運転もしくは、ご自身の手によるドライブのどちらかを選択できるようになります。自動運転により、毎日の通勤が無駄な時間から有益な時間へと変わり、仕事と快適性の新しい可能性が広がります」と述べている。

デモカーを超える領域へ
ボルボのオートパイロットシステムは、車が自動走行モードであらゆる側面に対応できるように、十分な信頼性を持って設計されている。今までに実証した自動運転システムを超える大きな一歩を踏み出したのは、フォールトトレラントシステム(対故障技術)が組み込まれている為。
ボルボの技術スペシャリスト、エリック・コーリン氏は「自動運転のコンセプトカーを開発し、実証することは比較的簡単です。しかし、実社会に自動運転を普及させるには、安全でしっかりしているだけではなく、一般の生活者にとって手頃な価格で完全なシステムを設計・生産する必要があります。このプロジェクトの課題は、発生し得る技術的な障害だけではなく、あらゆる交通状況に対応できる自動操作を構築することです。自動運転中はドライバーによる瞬時の危険回避行動にはあまり期待できません。実験の初期段階では、対向車やサイクリスト、歩行者がいないなどの条件を備えた道路を自動走行することになるでしょう」と述べた。
バックアップシステム
エリック・コーリン氏は「この複雑なシステムの信頼性を99%にするだけでは不十分です。自動運転車が実際の交通環境で他の道路の利用者と共存するには、可能な限り100%に近づける必要があります。そこで私たちは、航空機産業と同様のアプローチをしています。私たちのフェイルオペレーショナルアーキテクチャーには、システムの構成要素の一部が使用不可になった場合にも、自動操作が安全かつ確実に機能し続けるバックアップシステムが組み込まれています。例えば、ブレーキシステムに障害が発生する可能性は極めて低いですが、自動運転車には、車両にブレーキをかけて停止させる独立したシステムがもう一つ必要です。なぜなら、トラブルの発生時にドライバーがブレーキペダルを踏む準備ができている可能性は低いからです」と述べている。
複雑な交通状況への対処
実際の道路上では、自動運転システムは、スムーズな通勤から交通渋滞、緊急事態まで、あらゆる道路状況に対処しなければならない。「優秀なドライバーと同様、起こりうる危険な状況には、合理的な判断で対処します。しかし、実際に緊急事態が発生した場合、自動運転車は、ほとんどの人間よりも素早く反応することができます」とエリック・コーリン氏は語る。
異常な気象条件や技術的な障害、設定されたルートの終点に到着するなどにより、自動運転が利用できない状況になると、ドライバーは運転を引き継ぐようシステムから求められる。何らかの理由でドライバーが対応できず、時間内に運転を引き継ぐことができない場合、自動運転車は自ら交通の流れから離れて、自動で安全な場所に移動して停車する。

生活者および社会の利益
自動運転車は人々の生活をシンプルにし、毎日の通勤をより有益な時間へと変化させるほかに、環境的なメリットをもたらす。ボルボは、自動運転により燃料消費量を削減できることを見込んでいる。また、交通の流れの改善や都市計画、よりコスト効率の良いインフラ投資の可能性を広げることも想定している。
エリック・コーリン氏は次のように述べている「自動運転車の完全なテクノロジーソリューションを開発することは、重要なステップです。この実証実験が動き出せば、自動運転車を実際の交通環境下で実現することに際して、有益な情報が得られます。また、自動運転車が持続可能なモビリティにどのように貢献できるかを調査することも可能となります。自動運転車の開発は解決策の一つですが、将来の持続可能なパーソナルモビリティを実現するには、広範囲に渡る社会的なアプローチも同時に必要です。官民を合わせた組織横断的な協力体制が、自動運転車の開発に向けた成功の鍵となります」
▼「ドライブ・ミー」システムソリューションの重要な構成要素
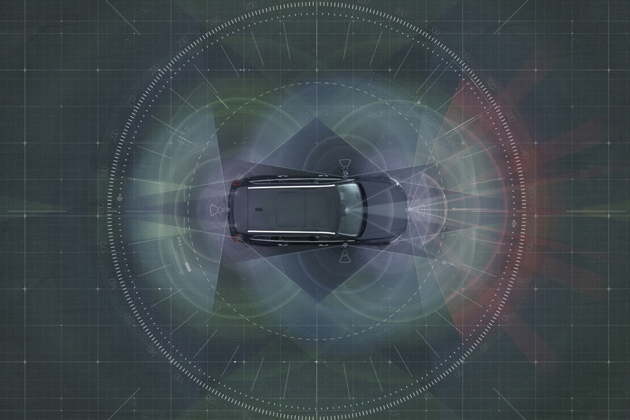
センサーテクノロジー
ボルボは、正確な測位情報と自車周囲の360度ビューを生みだす包括的なソリューションを開発していいる。このソリューションは、複数のレーダー、カメラ、およびレーザーセンサーを組み合わせることにより実現される。重層的なコンピューターのネットワークにより情報を処理し、実際の交通環境の中で、移動しているものと静止しているものをリアルタイムに描き出す。
高精度の測位は、これらの周囲情報とGPS、およびリアルタイムデータで常時更新される高解像度3Dデジタルマップに基づいて行われる。このシステムは信頼性が高く、ドライバーの指示を必要としない。
レーダーとカメラの併用
76GHzデュアルモード・ミリ波レーダーとフロントガラスに設置されたカメラを組み合わせて使用しているが、これは新型XC90で採用されているシステムと同様である。このシステムは、交通標識や道路の曲率を読み取り、車両や歩行者といった道路上の物体を検知する。
360度レーダー
フロントバンパーとリアバンパーの内側に取り付けられた4つのレーダー(車両の4隅に1つずつ)を配置して、全方向の物体を検知する。左右を見渡すように電波を発信し、標識やポール、トンネルなどに反射させることで、自動車の周囲360度を監視する。
360度サラウンドビジョン
4台のカメラで車両付近の物体を監視。カメラはバックミラー下に2台、リアバンパー内に1台、ラジエーターグリル内に1台搭載。これらのカメラは、至近距離の物体を検知するだけではなく、車線区分線も監視する。
また、ダイナミックレンジが広いため、トンネルに入ったときなど、明るさの急な変化にも対応可能。

マルチビームレーザースキャナー
このセンサーシステムは、車両のフロントのエアインテーク下に設置されている。このスキャナーは、自動車前方の物体を識別でき、極めて高い角度分解能力を誇る。また、複数の物体を区別することも可能だ。このユニークなレーザーセンサーの有効範囲は自動車から150メートルで140度の視野をカバーする。
3焦点カメラ
フロントガラス上部に設置された3焦点カメラは、1つに3台のカメラを収めたもので、広範な140度の視野、長距離をとらえる45度の視野、奥行きと遠くの物体を検出する34度の視野という3つの画角をとらえる。突然現れた歩行者や突発的な道路上の障害物等を識別することができる。
長距離レーダー
車両のリアバンパーに2つの長距離レーダーを設置し、優れた後方視界を確保している。この技術は、後方から高速で接近する車両を検知できるため、車線変更時に特に役立つ。
超音波センサー
車両の周囲に搭載する12個の超音波センサーは、自車に近づく物体を検知し、低速での自動運転をサポートする。このセンサーは、最新の駐車支援システムに使用されている技術をベースに開発されたもので、高度な信号処理能力を備えている。自動車周辺の歩行者や道路障害物の存在など、予期しない状況を検知する上で特に役立つ。
高解像度3Dデジタルマップ
高解像度3Dデジタルマップは、高さ、道路の曲率、車線数、トンネルの形状、ガードレール、標識、出口ランプなどの周辺情報を車両に提供するために使用されるツールである。これらはセンチメートル単位の精度を有する。

高性能測位システム
高性能GPSは、高機能GPS、3次元の加速度センサー、及び3次元ジャイロスコープとの組み合わせで機能を強化したポジショニングコントロールシステムの一部。多数のセンサーにより描き出された360度画像をマップイメージと照合することで、周辺情報と自車の位置関係を取得することができる。
そして、各種センサーとマップからの情報を組み合わせにより、道路状況、制限速度、臨時標識、その他の交通情報を考慮し、最良のコースをリアルタイムで選択することを可能にする。
クラウドサービス
クラウドサービスが交通当局のコントロールセンターに接続されている。これにより、最新の交通情報が常に入手可能。必要に応じ、コントロールセンターのオペレーターがドライバーに自動運転モードをオフにするよう指示する。






【PR】MOTAおすすめコンテンツ








自動車業界歴25年。自動車に関わるリテール営業からサービス・商品企画などに長らく従事。昨今の自動車販売業界に精通し、売れ筋の車について豊富な知識を持つ。車を買う人・車を売る人、双方の視点を柔軟に持つ強力なブレイン。ユーザーにとって価値があるコンテンツ・サービスを提供することをモットーとしている。










































この記事にコメントする