デンソーITLAB、米国「CVPR 2026」でモビリティの進化を促すAIの先端研究論文3本を発表
~コンピュータビジョン分野トップカンファレンスで、デンソー・東京科学大・九大との共同研究が採択~
クルマとモビリティ社会全体の未来を見据え、「種」となる先端基礎研究を行う株式会社デンソーアイティーラボラトリ(本社:東京都港区 代表取締役社長:岩崎 弘利、以下ITLAB)の研究者らによる3本の論文が、2026年6月3日から7日まで米国コロラド州デンバーで開催される「IEEE/CVF Conference on Computer Vision and Pattern Recognition 2026(CVPR 2026)」に採択されました。
●ITLAB HPのリリース:https://d-itlab.co.jp/release/20260527_cvpr2026-accepted-papers/
「CVPR」はコンピュータビジョンおよびパターン認識分野において国際的に権威のあるトップカンファレンスの一つで、今年度は16,092件の論文の中から4,090本の論文が採択され採択率は25.4%となっています。
今回採択された3本の論文は、それぞれデンソー、東京科学大学、九州大学の研究者との共同執筆論文であり、いずれも自動運転や先進運転支援システム(ADAS)をはじめとするモビリティ分野への応用が期待される研究成果です。既存手法の前提を見直し新たな手法を提案した独創性と、その有効性を実証した点などが高く評価されました。
デンソーグループ全体でみると、本リリース記載のITLABとの共同研究から出された3本に加え、米国現地法人であるDENSO International America, Inc. から1本が採択され、合計4本の論文がCVPR2026 にて発表されます。
参考:https://www.denso.com/us-ca/en/news/newsroom/2026/20260526-01/
■採択された論文の概要
1. 学習済みビジョンモデルに隠された対称性を用いた新しい量子化手法の提案
スマートフォンから車載システムまで、高精度なAIをハードウェアの限られた電力・計算資源の中で動かすニーズは急拡大しています。そのための技術が、AIモデルの内部パラメータを、高精度な浮動小数点数から少ないビット数の整数に変換する「量子化」です。メモリ使用量と計算量が削減できる一方、変換の過程で生じる量子化誤差によって認識精度が下がります。このトレードオフをどう解くかが長年の課題でした。
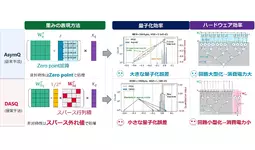
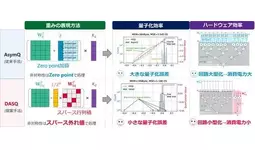
これに対し、ITLABとデンソーの共同研究チームは、学習済みビジョンモデルの重みを詳細に分析する中で、わずかな外れ値、例えば上位1%程度の外れ値を取り除くだけで残りの分布が0を中心にほぼ対称になることを発見しました。これは「外れ値を別に扱うことで、重みの大部分をハードウェア効率の高い対称量子化で表現できる」ことを意味します。本研究では、この「隠れた対称性」を出発点とした量子化手法「DASQ(Dense and Additive Sparse Quantization)」を提案しました。
DASQは重みを「対称な大多数の成分」と「外れ値の少数の成分」に分解して並列処理することで、従来手法が必要としてきたゼロ点オフセット(量子化の基準点をゼロからずらす値で、乗算器の回路面積を約1.3倍に増大させる)を不要にする設計を実現しました。FPGA(用途に応じて回路構成を変更できる再構成可能な集積回路)への実装評価でも、従来用いられてきたゼロ点オフセットを用いた量子化(AsymQ)と比べてより高い精度と低い消費電力を実証しています。
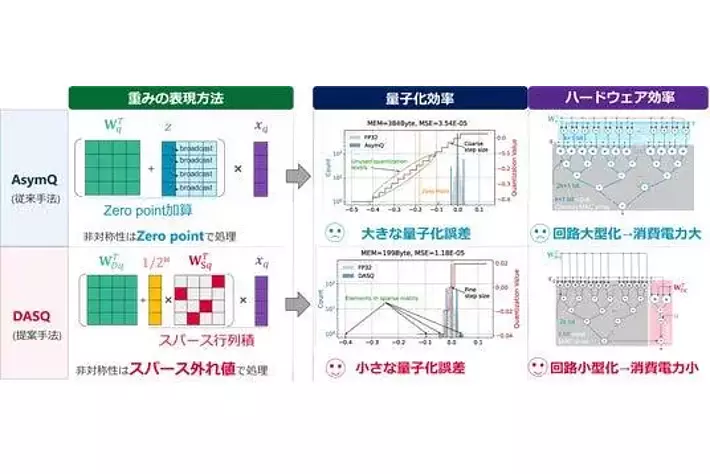
DASQは、従来の非対称量子化(AsymQ)で用いるゼロ点オフセットを使わず、重みを密な成分と疎な外れ値成分に分けて並列処理することで、高精度かつ効率的な量子化を実現する。
自動運転やADASでは、物体認識・歩行者検出などの高精度ビジョンモデルを消費電力に厳しい制約のある車載SoC(AI処理や制御などの機能を1つの半導体チップに集積した車載向けプロセッサ)上でリアルタイムに動作させる必要があります。DASQは、アルゴリズムからハードウェア実装までを見据えた設計により、車載SoCを含むエッジ端末での省電力かつ高精度なAI推論に貢献することが期待されます。
<ITLAB研究者コメント>
森 政文
デンソーアイティーラボラトリ 研究開発グループ 客員研究員
権業 慎也(Ph.D.)
デンソーアイティーラボラトリ 研究開発グループ リサーチャ
CVPRでは、ビジョンモデルの重み分布に潜む「隠れた対称性」の発見、量子化手法DASQの提案、そして複数タスクとFPGA実装による検証という、発見・手法・実証の三拍子をそろえた点が評価されました。今後は、車載AIを含むエッジ端末で高性能なビジョンモデルの省電力な実装を可能にする基礎技術として、実用展開が期待されます。

<本研究の論文>
Rethinking Asymmetric Quantization: Hidden Symmetry in Vision Model Weights
Masafumi Mori (DENSO CORPORATION), Shinya Gongyo & Mitsuru Ambai (DENSO IT Laboratory)
2. 事前学習済み教師モデルによるMixture of Experts型視覚認識AIの安定学習
大規模Vision AIの効率化において、スパースMoE(Mixture of Experts:複数の専門家モデルを組み合わせるアーキテクチャ)は有力な手法です。入力ごとに一部の専門家だけを選んで活性化することで、省計算な視覚認識AIを実現しながら高い表現力を保てます。人間に例えると、何でも一人でこなそうとするのではなく、案件ごとに適切な専門家に振り分けるイメージです。一方で、その振り分け係(ルーター)は学習が不安定になりやすいという課題があります。
本研究でITLABと東京科学大の共同研究チームは、この不安定性の主要因として「勾配ブロッキング」に着目しました。スパースMoEでは、ルーターが選んだ専門家だけが計算に使われるため、その専門家を通した経路以外からフィードバックを得ません。その結果、特に専門家の役割分担がまだ形成されていない学習初期には、ルーターが適切な専門家を選ぶ判断基準を安定して学びにくく、専門家の振り分けが学習中に大きく揺れやすくなります。この不安定性は、スパースMoEが有する省計算性を保ったまま高い表現力を十分に引き出す上での課題となります。
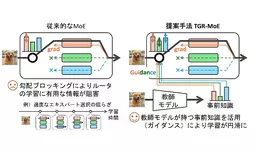
本研究の提案手法のTGR-MoEは、この問題を事前学習済みの「教師モデル」を用いることで解決します。教師用のルーターを付加し、その専門家選択の分布を擬似教師信号として学習中のルーターに与えることで、学習初期から安定した専門家選択の指針を与えます。これにより、専門家選択の揺らぎを抑え、より安定したMoEの学習を可能にします。
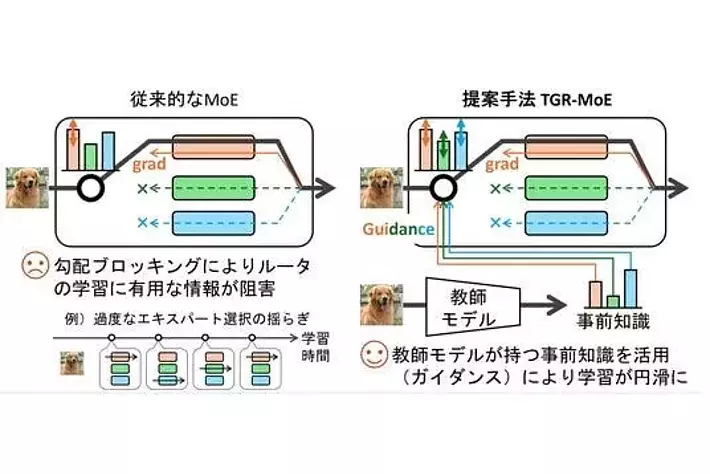
従来のスパースMoEでは、選択された専門家からの学習信号に依存するため、専門家選択が不安定になりやすい。TGR-MoEは、教師モデル由来の専門家選択の指針を与えることで、ルーターの学習を安定化する。
ImageNet-1KやCIFAR-100などの複数の画像認識ベンチマークを用いた検証で、TGR-MoEは標準的なスパースMoEと比較して、認識精度と専門家選択の一貫性を向上させました。また、本手法では推論時、すなわち実際にモデルを動かす際の追加計算コストは発生しません。そのため、大規模Vision AIを効率的かつ安定に活用するための基盤技術として、車載AIを含む高性能な視覚認識システムへの応用が期待されます。
<ITLAB研究者コメント>
佐藤 育郎(Ph.D.)
デンソーアイティーラボラトリ 研究開発グループ
プリンシパルリサーチャ
東京科学大 特任教授
CVPRでは、従来学習が不安定であったスパースMoEの学習を安定化させる方法を提供したことが評価されました。この研究は、運転支援システムや自動運転システムにおいて、大規模Vision AIを効率的かつ安定に活用するための基盤技術となることが期待されます。

<本研究の論文>
Teacher-Guided Routing for Sparse Vision Mixture-of-Experts
Masahiro Kada & Ryota Yoshihashi (Institute of Science Tokyo) Satoshi Ikehata (DENSO IT Laboratory, National Institute of Informatics) Rei Kawakami(Institute of Science Tokyo) Ikuro Sato (Institute of Science Tokyo, DENSO IT Laboratory)
3. 実センサーの制約を前提としたI-ToFカメラのコーディング方式の提案
I-ToF(間接飛行時間計測)カメラは、変調した光を照射してその反射光との位相差を用いて距離を測る深度センサーです。高い空間分解能とコンパクトな形状から、AR・ロボティクス・コンシューマー機器など幅広い用途で普及している深度センシング技術であり、自動運転・ADAS向けの近距離周辺認識や車内モニタリングへの応用も期待されています。
このカメラの距離精度は、「コーディング方式」(光の照射パターンと受け取り方の組み合わせ)によって大きく左右されます。しかし先行研究の多くが現実のセンサーが持つ制約を十分に反映しない理想的な条件を前提としており、実機では理論通りの性能が出せないという課題がありました。そこで、本研究でITLABと九州大学の共同研究チームは、この「理想と現実のギャップ」の解決に取り組みました。
現実のI-ToFセンサーでは「光の受け取り口を同時に複数使えない」という物理的な制約があります。そのため、本研究では、この制約に加え、光源のピークパワー、帯域制限、発光・受光信号が二値であることなど、実センサーの制約を設計段階から織り込みました。そのうえで、距離誤差を小さくするための数理的な指標を導入し、実機で実装可能な範囲の中から高精度なコーディング方式を探索できるようにしました。
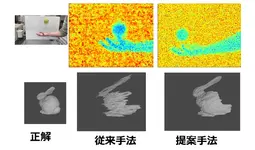
評価実験では、5msの露光時間でも、従来の15msの露光での結果を上回る距離精度を達成しました。これにより、センサー本体を変えることなく、発光・受光の制御パターンを変更することで、露光時間ベースでは最大3倍相当の高フレームレート化につながる可能性を示しました。また、動く手や落下するボールを対象とした実験でも、ノイズやモーションブラーの低減が確認されており、既存のI-ToFセンサーを用いたリアルタイム3Dセンシングの性能向上に貢献するアプローチです。
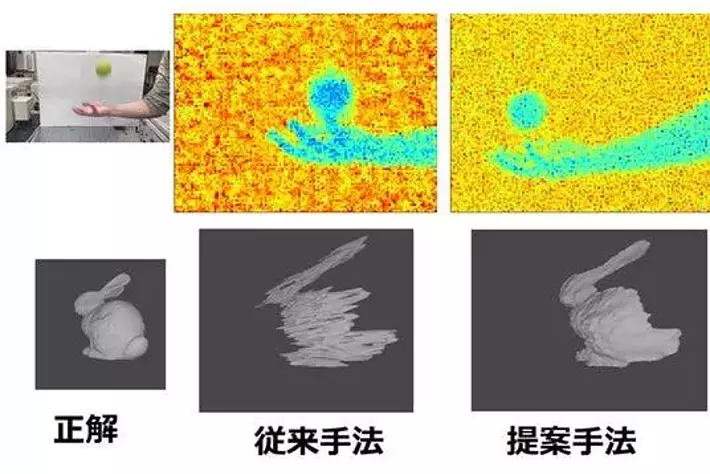
コーディング方式の比較結果(上段:実機I-ToF、下段:シミュレーション)。提案したコーディング方式により、従来方式と比べてノイズやモーションブラーを抑え、動く物体の距離形状をより鮮明に計測できることを示している。
<ITLAB研究者コメント>
佐川 立昌(Ph.D.)
デンソーアイティーラボラトリ 研究開発グループ
プリンシパルリサーチャ
本研究では、I-ToFカメラのコーディング方式を、理想的な条件ではなく実センサーの制約を前提として設計することに取り組みました。提案手法により、低SNR環境や動く物体に対しても、短い露光時間でより安定した3Dセンシングを実現できる可能性を示しました。CVPRの査読においても、理想化された条件ではなく実際のセンサ制約のもとでI-ToF の符号設計を扱う問題設定が重要だと評価されています。今後、自律ロボットや車載システムなど、実環境で高信頼な周辺認識が求められる応用への展開が期待できます。

<本研究の論文>
Revisiting Optimal Coding for I-ToF under Practical Sensor Constraints
Wenbin Luo & Takafumi Iwaguchi (Kyushu University), Ryusuke Sagawa (DENSO IT Laboratory), Hiroshi Kawasaki (Kyushu University)
●参考:共同研究を行いました九州大学 システム情報科学研究院 川崎洋 教授所属の九州大学広報課による本件詳細リリースはこちらをご覧ください。
I-ToFセンサの特性を考慮したノイズに頑健な符号化方式の提案
~自律ロボットや車載システムにおける3D認識の精度と安定性を向上~
日本語版:https://www.kyushu-u.ac.jp/ja/notices/view/3110
英語版:https://www.kyushu-u.ac.jp/en/notices/view/536
■CVPR2026について
https://cvpr.thecvf.com/
CVPR(IEEE/CVF Conference on Computer Vision and Pattern Recognition)は、IEEE(米国電気電子学会)とCVF(Computer Vision Foundation:コンピュータビジョン研究を支援する非営利団体)が共催する、コンピュータビジョンおよびパターン認識分野における世界最高峰の国際会議です。ICCV・ECCVと並ぶトップ会議の一つとして知られ、画像認識、物体検出、3次元認識、生成AIなど人工知能の発展を支える視覚情報処理に関する世界最先端の研究成果が発表されています。また、採択論文の被引用数や研究コミュニティへの影響力も高く、コンピュータビジョン分野の最新動向を示す重要な場となっています。近年は参加者数が1万人を超える大規模な国際会議となっており、大学・研究機関に加えて、Google、Meta、Microsoft、NVIDIAなどの世界的な企業の研究部門からも多数の発表が行われています。
■株式会社デンソーアイティーラボラトリとは
デンソーグループのソフトウェア研究を担う28人ほどの研究者集団であり、「自分たちで課題を見つけ、それを解決する技術の柱を作る」シーズ提案型の先端基礎研究企業です。研究分野には、深層学習やニューラルネットワーク、画像認識、自然言語処理、認知科学、信号処理、ユーザーインターフェース、センシング技術などがあります。株式会社デンソーの100%出資子会社となります。
社名 :株式会社デンソーアイティーラボラトリ
HP : https://www.d-itlab.co.jp/
所在地 :〒105-0004
東京都港区新橋4丁目3-1
新虎安田ビル 13階







愛車の売却を、もっと楽に!もっと高く!
-
一括査定はたくさんの買取店からの電話が面倒?
これまでの一括査定は、たくさんの買取店からの電話が面倒でした。MOTA車買取なら、最大20社の査定額をwebで簡単比較。やり取りするのは査定額上位の3社だけ。車の査定が楽に完結する仕組みです。
-
一括査定は本当に高く売れるの?
これまでは、買取店に会わないと査定額がわからず、比較がしづらい仕組みでした。MOTA車買取は最短3時間後、最大20社を簡単比較。加えて、買取店は査定額上位3社に選ばれるために競い合うから、どうしても高く売れてしまいます。
検索ワード
MOTA編集部は自動車に関する豊富な知識を持つ専門家チーム。ユーザーにとって価値のあるコンテンツ・サービスを提供することをモットーに、新型車の情報や、自動車の購入・売買のノウハウなど、自動車に関する情報を誰にでも分かりやすく解説できるように監修しています。







