自動運転の日独戦、『ハノーバー宣言』で地図データの覇権争いに終止符か
- 筆者: 桃田 健史
- カメラマン:桃田健史










ハノーバー宣言の衝撃

2017年3月、日本の自動運転開発者の間で衝撃的な出来事が起こった。
舞台となったのは、ドイツ北部の街、ハノーバー。世界最大級の通信と情報に関する見本市であるCeBIT(セビット)で行われた、メルケル首相と安倍首相との独日首脳会談の後の共同声明でのことだ。
ここで、ドイツと日本が、IoT(モノのインターネット化)及び、第四次産業革命とも称されるインダストリー4.0を両国が協調して推進していくことを示した。これを、『ハノーバー宣言』と呼ぶ。
ハノーバー宣言の具体的な項目としては、サイバーセキュリティ、国際標準化、規制緩和、中小企業支援、研究開発、プラットフォーム、デジタル人材育成、情報通信分野の協力、そして自動車産業という9つを挙げた。
そのなかで、自動車産業では、『電動モビリティ・自動運転・コネクテッドカー等に関する覚書』としており、協力分野として、充電インフラや燃料電池などと並んで、自動運転における、ダイナミックマップ(3Dマップ)の技術が明記された。
キーファクターは、このダイナミックマップ(3Dマップ)だ。自動運転における地図を、ドイツと日本が協調することは、日本で自動運転技術を開発する自動車メーカー、自動車部品メーカー、そして地図メーカーにとって極めて大きなハードルなのである。
自動運転の地図は、単なるカーナビではない


ダイナミックマップの説明をする前に、自動運転にとっての地図の重要性からご紹介したい。
自動運転とは、人が運転していることを自動で行うものだ。では、運転とはどういう行為か? それは、「認知・判断・操作」という3つを繰り返すことである。
まず、認知とは、目による視覚、耳による聴覚、また鼻による嗅覚などによる『センシング』によって外部の情報を得ることだ。
判断とは、入手した情報を『アナライズ(分析)』すること。そして、操作とは、ステアリングを切ったり、アクセルやブレーキを踏むという、具体的な運転操作を指す。
これら3つの要素を自動運転では、カメラ、レーダー、超音波センサー、レーザーレーダー(通称ライダー)などのセンサーによって認知し、CPUやGPUといった演算装置によって判断して、アクチュエーターと呼ぶ可変機器によってステアリングなどを操作する。
こうした自動運転における一連の流れのなかで重要となるのが、地図情報だ。
一般の方にとって、クルマにおける地図というと、カーナビを連想するだろう。カーナビの役目は、出発点から目的地までの経路と、自車位置を地図上に映し出すことで、人の運転を手助けすることだ。技術的には、車載カーナビの場合、現在のGPSでは数十メートルの精度でだいたいの自車位置を割り出す。その上で、クルマの動きを感知するジャイロセンサーや、クルマの移動速度などから、地図上の道とのマッチングを行っている。
一方で、自動運転においても、カーナビと同様に経路と自車位置の把握が必要だが、当然、その精度は運転者がいる場合に比べて高い精度が求められる。換言すれば、自動運転にとって地図情報は生命線なのだ。
世界における高精度三次元地図の覇権争い

自動運転用の地図は、三次元(3D)地図と呼ばれるように、対象物を立体的に表示するものだ。そうした地図を生成するには、レーザーレーダー(通称ライダー)を主体としたセンサーによって高い情報量によるデータ収集が必要だ。
これを世界で最も大量に行っているのが、独ベルリンを本拠とするHERE(ヒア)だ。もともと同社は、米シカゴのナブテックという地図情報の企業だったが、フィンランドの通信情報企業のノキアが買収し、ベルリンのベンチャー企業と合併させた。HEREはカーナビ向けで世界最大シェアを誇ってきたが、2013年頃から来る自動運転時代を見据えて、高精度三次元地図の生成用に数百台の車両を世界各地に配備する体制を敷いた。
このHEREを2013年、ジャーマン3のダイムラー・BMW・VWグループ(アウディ)が買収した。つまり、ジャーマン3は自動運転における地図情報について、事実上の世界標準といえるデファクトスタンダードを狙っているのだ。
HERE以外には、アップルのiPhone向け地図などを提供しているオランダのTomTom(トムトム)も独ボッシュと連携して、自動運転用の高精度三次元地図を独自に開発している。中国では、百度(バイドゥ)、アリババ、テンセントというITビック3が中国国内専用の高精度三次元地図を開発中だ。
また、米グーグルはグーグルマップをベースに、アメリカ国内で自動運転の公道実証試験を行うことが法整備されているカリフォルニア州やネバダ州などで独自の高精度三次元地図だけでなく、HEREの地図情報も併せて活用している模様だ。
日本はガラパゴス?
では、日本の状況はどうなっているのか?
カーナビについては、地図企業のゼンリンや、パイオニアの子会社のインクリメントP(ピー)が独自に生成した地図情報を提供しているが、高精度三次元地図については、生成のコストが全国の主要道路を網羅する場合に約1000億円かかるとの試算があるため、地図企業の単独の投資では難しいという判断だ。
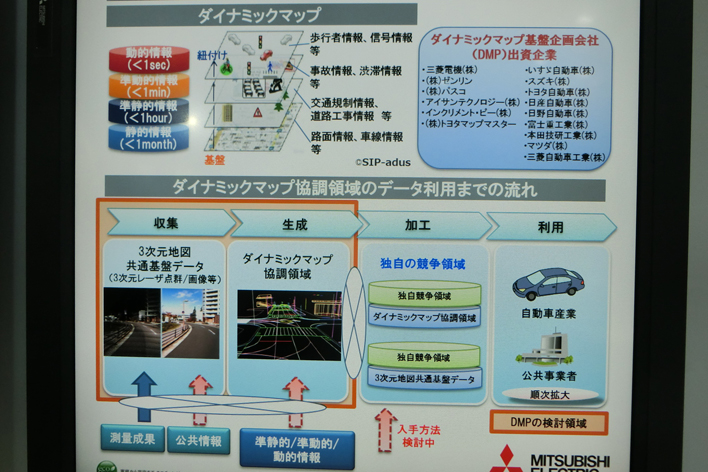
そこで、政府が内閣府を中心として関係各省庁、自動車メーカー各社、また大学などの研究機関と連携するオールジャパン体制で次世代技術の研究を進める、SIP(戦略的イノベーション創造プログラム)の枠組みとして、日本独自の高精度三次元地図の生成を目指している。これが、ダイナミックマップだ。
ダイナミックマップもHEREマップも、単純な3D地図ではなく、走行中の各車からクラウドを通じて収集される走行状態や、気象情報などを連動させたビックデータという位置付けだ。そのうえで、ダイナミックマップには、日本人のキメの細かいモノ造り思想を組みこもうとしている。
だが、ダイナミックマップは日本市場を主体に、自動車産業を含めて日本企業の社会的影響力が強い東南アジア向けに普及を狙うというガラパゴス的な存在だ。
そうした中で、HEREは以前から日本の地図企業に対して、カーナビ向けでの世界最大シェアを誇るHEREが考える高精度三次元地図の基本プラットフォームをダイナミックマップでも組み込むことを推奨してきた。だが、日本側としてはそうした黒船によって日本企業の国際競争力が衰えることを懸念してきた。
ところが2017年3月、前述のハノーバー宣言が出た。これはダイナミックマップがHEREマップと協調することを両政府が強く求めたということだ。
ダイナミックマップの関係者は、5月に東京で開催された自動運転に関するカンファレンスで「HEREとの協議の具体的なロードマップは、まだ立っていない。課題は互換性をどのように持たせるかだ」と語るに留めた。
どうやらこのまま、自動運転の生命線である高精度三次元地図の覇権は、ドイツに奪われてしまいそうだ。
[Text:桃田健史]








【PR】MOTAおすすめコンテンツ

検索ワード







日米を拠点に、欧州、BRICs(新興国)、東南アジアなど世界各地で自動車産業を追う「年間飛行距離が最も長い、日本人自動車ジャーナリスト」。自動車雑誌への各種の連載を持つ他、日経Automotive Technologyで電気自動車など次世代車取材、日本テレビで自動車レース中継番組の解説などを務める。近著「エコカー世界大戦争の勝者は誰だ?」(ダイヤモンド社)。1962年東京生まれ。記事一覧を見る

自動車業界歴25年。自動車に関わるリテール営業からサービス・商品企画などに長らく従事。昨今の自動車販売業界に精通し、売れ筋の車について豊富な知識を持つ。車を買う人・車を売る人、双方の視点を柔軟に持つ強力なブレイン。ユーザーにとって価値があるコンテンツ・サービスを提供することをモットーとしている。








































この記事にコメントする